|
A.M.F.N. |
|
Association
des Modélistes Ferroviaires de Nice
Une
automotrice HOe alimentée par batterie
et
commandée par smartphone en WiFi
Lorsqu'on
est amateur de voie très étroite, et qu'on se régale
à faire circuler des matériels pittoresques sur des voies
herbeuses, à demi enterrées et savamment délabrées,
on est assez vite confronté au problème de la mauvaise captation.
On
peut certes multiplier les prises de courant, ou digitaliser le matériel
en ajoutant un condensateur de maintien, mais la circulation au ralenti
reste un problème permanent.
D'où
l'idée d'alimenter les engins sur batterie, en commençant
par ce petit véhicule articulé bien connu des HOe-istes:
l'automotrice Egger-Bahn 1010.
 Pour la
commande, il est fait appel à un module de la famille des ESP8266,
l'ESP12s, qui assure les communications en WiFi et gère aussi le
fonctionnement de l'engin, à la façon d'un décodeur
digital.
Pour la
commande, il est fait appel à un module de la famille des ESP8266,
l'ESP12s, qui assure les communications en WiFi et gère aussi le
fonctionnement de l'engin, à la façon d'un décodeur
digital.
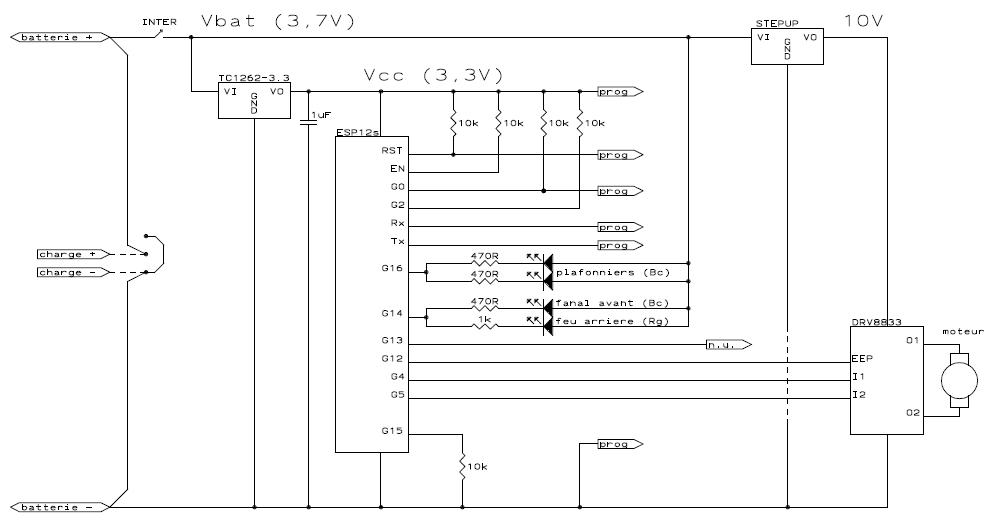
Schéma
de principe:
| Le
montage (cliquez sur l'image pour l'agrandir) est fait autour du module
ESP12s.
La
tension de la batterie est appliquée d'une part à un régulateur
LDO pour alimenter l'ESP12s en 3,3V, et d'autre part à un convertisseur
élévateur (step-up) pour alimenter le moteur en 10V.
Un
"pont en H" DRV8833 permet d'appliquer au moteur une tension hachée
(vitesse) et de polarité (sens) ad-hoc. |
 |
Notes:
les différentes LEDs sont connectées directement à
la batterie pour soulager le régulateur 3,3V.
le moteur est alimenté en seulement 10V à cause de la limitation
du pont DRV8833. Mais ce pont a été choisi pour sa petite
taille, et 10V suffisent pour assurer un fonctionnement réaliste.
la
batterie est rechargée par un chargeur externe.
Réalisation:
L'ESP12s
est monté sur un petit circuit imprimé dessiné spécialement.
Toutes les résistances sont au dos.
Le
pont en H DRV8833 est connecté dans le prolongement du circuit.
Comme
le circuit se loge dans le toit, deux LEDs blanches font office de plafonniers. |

|
Notes:
le circuit a été dessiné à l'origine pour un
régulateur HT7333, mais suite à des problèmes avec
ce composant, il a été remplacé par un TC1262, dont
malheureusement l'empreinte est différente.
il y a six points de connexion (à gauche de l'ESP) qui permettent
de charger le programme au départ, et de le recharger en cas de
problème avec l'OTA.

Pour dégager
de la place pour l'aménagement intérieur, l'électronique
est logée sous le toit.
Malgré
tout il n'a pas été possible d'ajouter un avertisseur. Nous
en cherchons un tout petit.
Le
convertisseur "step-up" est intégré dans le plancher:

Vue
de l'intérieur:

| L'aménagement
intérieur est réduit à quelques bustes de voyageurs. |

|
Une
fois peints, les composants qui dépassent sous le châssis
évoquent assez bien les réservoirs et autres organes qu'on
trouve là en réalité:

Au
final (cliquez sur les images)...
Une
petite vidéo provisoire.
Partie
logicielle:
On
trouve sur internet de nombreuses pages exposant de façon détaillée
la mise en oeuvre des ESP8266, aussi nous n'y reviendrons pas.
La
plupart de ces pages décrivent comment implémenter un serveur
HTML dans le module, qui peut alors être commandé depuis un
ordiphone, une tablette ou un ordinateur par le biais d'un simple navigateur.
Nous
avons procédé différemment, en utilisant plutôt
le protocole UDP, qui est très simple et très rapide, mais
nécessite une "appli" dans l'ordiphone. Mais cette application existe:
c'est l'appli ROCO Z21. Le protocole en est décrit sur le net, et
l'utilisation que nous en faisons est extrêmement simplifiée:
seuls quelques messages sont traités, et nombre de paramètres
sont limités à un seul octet.
Télécharger
le programme.
Note:
en l'état, ce programme n'analyse pas l'adresse DCC contenue dans
le paquet, pas plus qu'il ne vérifie la checksum figurant en fin
de message.
Commande
de plusieurs engins:
Comme
d'autres réalisations de ce type sont en projet, on peut se demander
comment contrôler simultanément plusieurs engins moteurs.
Cela
peut se faire assez simplement un réalisant un "re-routeur" de paquets
UDP.
Les
paquets émis par l'application Z21 ont des paramètres fixes:
adresse IP et port du destinataire. Mais ils contiennent l'adresse DCC
de l'engin à commander.
Le
fonctionnement du re-routeur consiste à récupérer
tous les paquets (il est vu comme une centrale par les ordiphones), en
extraire l'adresse DCC, et renvoyer chaque paquet à l'adresse IP
de l'engin.
Par
exemple, et pour simplifier nos tests, les paquets contenant l'adresse
DCC X sont réacheminés à l'adresse IP
192.168.1.X.
En
pratique, le re-routeur a été réalisé par programme
à l'intérieur du PC qui gère le réseau, et
également à titre de test par un ESP8266 indépendant.
Intégration
à un système existant:
On
peut mélanger les engins WiFi et les engins DCC. Pour cela il suffit
que le re-routeur transmette directement à la centrale DCC les paquets
qui ne sont pas destinés à un engin WiFi.
Améliorations
possibles:
Cette
réalisation était un prototype. On pourrait lui ajouter une
mesure de la tension de la batterie, un avertisseur sonore, etc.
Remerciements:
à
JC pour sa
réalisation Car-System,
à mon ami Marc, pour m'avoir procuré une caisse martyre,
aux membres de l'excellent forum
Locoduino, qui m'ont donné des tuyaux intéressants.
|
page précédente:
utilisez la touche "PRÉCÉDENT(E)" de votre navigateur
|
|
|