 |
A.M.F.N. |
|
Association
des Modélistes Ferroviaires de Nice
Un
bloc-sytème pour les véhicules du Car-System Faller ©
Le dispositif
d'arrêt magnétique
Principe
du bloc-système
Un exemple
d'exploitation complexe
Réglages
Pourquoi
ce bloc-système?
Lorsque plusieurs véhicules
circulent sur la même route, il est intéressant de prévoir
un sytème d'espacement pour éviter les collisions par rattrapage.
Les véhicules du
Car-System
Faller © sont équipés d'origine d'un ILS qui permet
des les arrêter par un électro-aimant disposé sous
le plan de roulement.
Faller a prévu différents
modèles d'électro-aimants: alimentés pour l'arrêt
ou alimentés pour le passage. En fait, Faller propose même
des modules de bloc-système tout faits.
Cependant ce système
ne nous satisfaisait pas, justement à cause des électro-aimants,
pour plusieurs raisons: consommation électrique importante, impossibilité
de les laisser sous tension en permanence, perte d'information lors de
la mise hors tension, et coût pour un réseau important.
Nous avons préféré
équiper notre réseau routier de "dispositifs d'arrêt
magnétique" (DAMs) de notre conception, qui peuvent rester indéfiniment
dans un état ou un autre ans consommation de courant.
Le
dispositif d'arrêt magnétique:
Les dispositifs d'arrêt
magnétiques (DAMs) sont constitués d' un aimant monté
sur un servo-moteur de modélisme classique, et commandés
par un micro-contrôleur PIC.
Voir la page
décrivant les stations de charge.
Principe
du bloc-système:
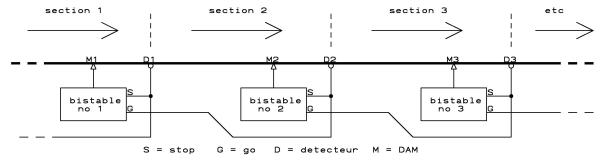
|
Un véhicule parcourt
la section 2 (de gauche à droite).
En arrivant vers la fin
de la section, le véhicule rencontre le Dispositif d'Arrêt
Magnétique (DAM) M2.
Si la section 3 est libre,
ce DAM M2 est ouvert; le véhicule le franchit.
Au passage section 2 ->
section 3, le véhicule actionne le détecteur D2.
Le détecteur D2:
ferme le DAM M2, empêchant
ainsi les véhicules suivants de pénétrer dans la section
3,
ouvre le DAM M1, permettant
aux véhicules suivants de pénétrer dans la section
2, maintenant libre. |
Un
exemple d'exploitation:

Gestion des bus devant
la gare:
Les véhicules arrivent
en haut à droite par la section 47. Les bus, qui sont munis d'un
petit aimant coté droit, activent le capteur "spécial bus".
La station 54, si elle est libre, commande alors l'aiguillage pour réceptionner
le bus, qui vient s'arrêter devant la gare . Les autres véhicules
passent directement de la section 47 à la section 55.
Après un certain
temps (descente des voyageurs), les bus repartent de la section 54 pour
aller se mettre en attente sur l'une des voies 56 à 58. Après
un nouveau temps d'attente (montée des voyageurs), les bus repartent
et rejoignent la circulation au niveau de la section 17.
Arrêt des véhicules
dans le sens ouest-est:
Les véhicules arrivant
en bas à gauche par la section 16 actionnent un capteur relié
au module 60. Si la section est libre, l'aiguille est actionnée
et le véhicule pénètre sur cette section. Sinon il
passe sur la section 59.
Passage à niveau:
Le bloc-système ferroviaire,
Zimo en l'occurence, commande un relais lorsque la section de voie du passage
à niveau est occupée par un train. Un contact du relais provoque
la mise à l'arrêt des dispositif d'arrêt magétiques
16 et 17.
Remarque:
Tout le câblage n'est
pas représenté sur ce schéma de principe. Il manque
notamment les fils inter-canton "amont-aval" qui relient tous les
modules entre eux.
Réglages:
Les stations sont réglables
par CVs, comme un décodeur de digital, à travers le port
série ou USB.
Certains CVs contrôlent
la position des servomoteurs, d'autres les différents paramètres
de fonctionnement (croisements, temporisations, etc), et d'autres encore
le protocole de communication avec le PC.
|
Utilisez
la touche "RETOUR" ou "PRÉCÉDENT" de votre navigateur
|
|
|