| A.M.F.N. |
| A.M.F.N. |
Pourquoi un nouveau bloc-système?
Pour remédier au défauts de l'ancien...
Tout simplement dans un but de simplification: la présence du PC permet de supprimer tous les composants logiques (relais ou circuits logiques) tout en permettant des fonctions extrêmement sophistiquées. Le matériel est réduit à sa plus simple expression, le coût s'en trouve diminué et la mise en service accélérée.
Pourquoi pas du digital?
Nous avons écarté le digital
afin que tous nos membres puissent apporter leurs locomotives au club et
les faire circuler sans restriction.
Le digital est aussi bien plus cher qu'un
système construit localement avec des composants de récupération,
comme c'est le cas ici.
Enfin, certaines options du digital ne
nous ont pas séduit: décentralisation de l'électronique,
avec pour conséquence un câblage très complexe, manque
de sophistication des programmes de gestion, toujours moins performants
que ceux que nous écrivons nous même, etc.
Pour accélérer la mise en service, et ne pas interrompre l'exploitation trop longtemps, nous devions nous adapter au réseau tel qu'il est, avec ses particularités:
Pour la même raison, les trains ne devaient être ni personnalisés ni déclarés (pas de cab-control).
Par ailleurs, après quelques essais préliminaires, nous avons renoncé à l'alimentation asservie, justement parce qu'elle nécessite, pour bien fonctionner, une personnalisation des trains (voir notre page sur le sujet).
Enfin, pour réduire les coûts, nous devions utiliser un maximum de composants de récupération: transistors, connecteurs, câbles, circuits intégrés, etc, ce qui fut le cas.
Une installation étagée:
Faute de temps et de moyens, l'installation
complète va s'étaler sur plusieurs années.
Actuellement, le PC contrôle les
trains en ligne et les signaux.
La gare de passage est en cours de réfection,
et lorsqu'elle sera terminée, elle sera également sous contrôle
du PC.
La gare terminus doit rester telle quelle,
sauf panne majeure.
L'éclairage permanent BF sera installé
ultérieurement.
Caractéristiques de l'interface:
| Les différentes cartes sont au
format 15x20cm, et sont disposées dans un rack en bois de fabrication
maison.
On trouve vers l'avant la connexion avec l'extérieur (PC, réseau, postes de commande) et au fond l'interconnexion par le fond de panier. |
 |
| Ci-contre, le rack vu coté cartes.
Il se présente sous forme d'une valise, pour être transportable. |
 |
 |
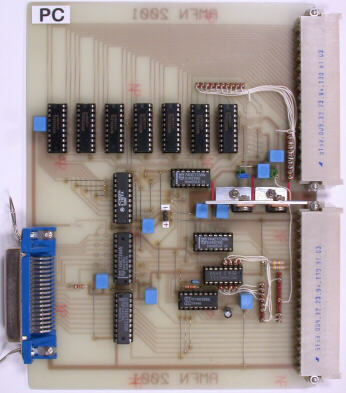
Carte interface PC:
| Elle assure le démultiplexage des
commandes envoyées par le PC sur le port parallèle, et la
régénération des signaux vers les autres cartes.
Elle supporte aussi, pour simplifier le câblage, les 8 convertisseurs numériques-analogiques quadruples qui commandent la traction sur les 32 cantons. Elle comprend enfin quelques points d'entrée-sortie destinés au contrôle des cartes du rack (commande de l'éclairage, disjoncteurs, etc). A gauche: le connecteur Centronic qui reçoit le câble en provenance de l'interface parallèle du PC (câble d'imprimante). A droite: les deux connecteurs du fond de panier. Cette carte étant faite avec des moyens d'amateur, donc avec des pistes assez larges, quelques connections sont réalisées en wrapping (fil blanc). |
 |
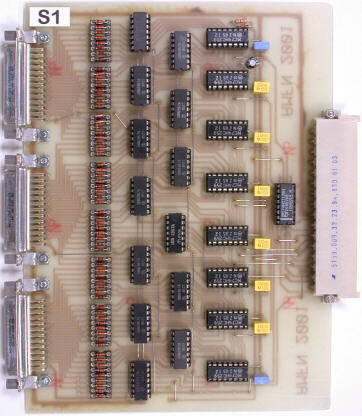
Carte pour 64 points de commande:
| Elle offre 64 points de sortie via des
drivers UDN2974, qui sont aux tensions négatives ce que les ULN2803
sont aux tensions positives: chacun comprend 5 darlingtons 50V, 500mA,
capables de commander des charges connectées à une tension
négative.
Les sorties se font sur les 3 connecteurs DB25 de gauche, à travers des diodes 1N4148 qui ont un double rôle: empêcher le mélange des différentes tensions utilisées pour LEDs, relais, etc, et servir de fusible en cas de court-circuit. Le connecteur de droite est celui du fond de panier. |
 |
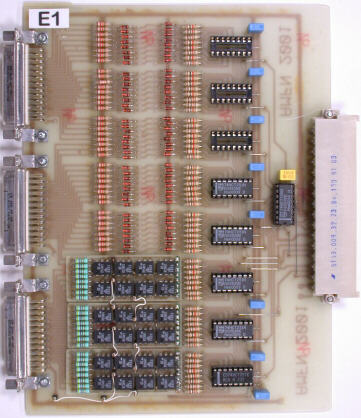
Carte pour 64 points de lecture:
| Elle offre 64 points d'entrée,
mais elle est actuellement sous équipée à 40.
24 points ont été équipés
de photo-coupleurs (en bas à gauche) pour isoler les entrées.
Ici aussi les entrées se font sur les 3 connecteurs DB25 de gauche. Le connecteur de droite est celui du fond de panier. |
 |
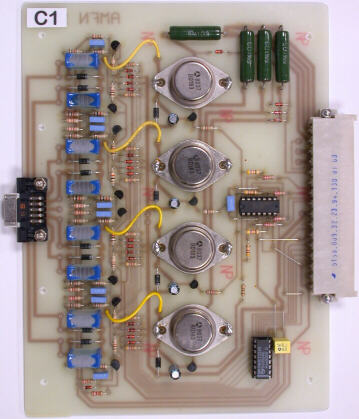
Carte pour 4 cantons:
| Elle permet de gérer 4 cantons,
c'est à dire de régler la vitesse et de détecter l'occupation
des deux parties du cantons: pleine voie et zone de fin de canton.
A gauche, les détecteurs
d'occupation de voie, qui ne comportent que des composants passifs et un
seul circuit logique.
Au centre, les deux transistors (darlington) de l'alimentation traction de chaque canton. En haut à droite, les résistances de détection des court-circuits. Les straps jaunes remplacent
les selfs de l'éclairage BF, non encore réalisées,
et qui seront supportées par une carte fille.
La connexion au réseau se fait par le connecteur DB9 de gauche. Le connecteur de droite est celui du fond de panier. |
 |
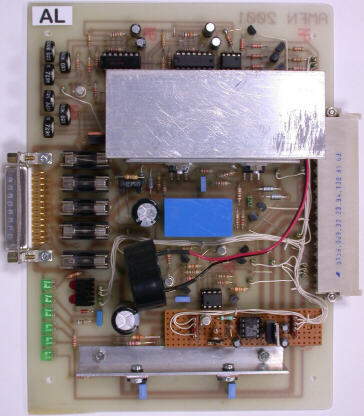
Carte d'alimentation générale:
C'est la plus complexe de l'ensemble.
Elle comprend:
Elle reçoit par le connecteur DB25 de gauche l'électricité en provenance de différents transformateurs. Le connecteur de droite est celui du fond de panier. Cette carte comporte également quelques connections en wrapping, mais de plus, quelques erreurs ayant été commises lors du dessin du circuit imprimé, ces erreurs ont été corrigées par adjonction du petit Veroboard (en bas à droite), également connecté en wrapping. |
 |
Le PC:
| Le PC est un IBM PS/1, mais n'importe
quel PC de récupération peut convenir.
On aperçoit à sa droite le rack, de profil. Le clavier est recouvert d'une protection contre la poussière, car il ne sert pas en exploitation normale. |
 |
|
L'écran du PC est utilisé pour la maintenance. Il affiche normalement le TCO ci-contre, où l'on voit: L'état des voies: L'état des signaux: La position des aiguilles est indiquée par un petit carré gris. |
 |
| Dans certaines circonstances,
l'écran peut passer en mode texte, par exemple pour afficher des
messages de maintenance, ou bien sur demande de l'opérateur, pour
afficher des informations plus complexes.
Ici, on a affiché l'état détaillé du canton 3, et celui des itinéraires (en gris: existants, en rouge: établis, en jaune: programmés, etc) |
 |
Pour les opérateurs,
rien n'a changé dans les principes de base de l'exploitation: les
gares et autres zones d'activité restent sous contrôle entièrement
manuel, et les voies en ligne sous contrôle du bloc-système.
Pour passer de l'un
à l'autre, il suffit d'établir un itinéraire de sortie
ou d'entrée de gare.
Par contre, les commandes d'aiguilles ont été pourvues de sécurités semblables à celles décrites ci-après.
Les postes de commande des bifurcations:
| Ces deux petits postes commandent les
deux bifurcations de pleine voie, et constituent une bonne illustration
de ce qu'on peut faire grâce à un PC:
En appuyant sur l'un des boutons (droit ou gauche), l'opérateur demande que l'aiguille se mettent dans la position correspondante. Si c'est possible, la manoeuvre a lieu et la LED correspondante s'allume. Sinon (train engagé sur l'aiguille) la demande est enregistrée et la LED clignote. Après dégagement du train, la manoeuvre est exécutée. Après enregistrement, l'opérateur a aussi la possibilité de ré-appuyer sur le bouton pour forcer la manoeuvre en surpassant les sécurités. On imagine ce qu'il faudrait de relais ou de circuits logiques pour réaliser la même chose en logique câblée. Ici, le PC s'occupe de tout: les boutons et la LED sont directement connectés aux cartes d'interfaces décrites plus haut. |
 |
Les postes de commande d'arrêt général et reprise:
| Ces petits postes de commande sont installés
à plusieurs endroits du réseau, sur le bandeau en bois vernis
qui le ceinture.
Le bouton rouge commande l'arrêt immédiat de tous les trains. La LED rouge (car elle est rouge en réalité!) indique différents états du système: disjonction, arrêt général, défaut de captation, etc. Le bouton vert commande la reprise, et l'acquittement des différentes sécurités. |
 |
Le nouveau TCO:
| Ce TCO est positionné en hauteur,
à un endroit d'où l'on voit tout le réseau.
Il est réalisé en médium fraisé et peint. Chaque canton est matérialisé
par une rangée de LEDs, qui sont éteintes quand le canton
est libre, allumées
Le TCO comprend 330 LEDs en |
 |
La page suivante
décrit la réalisation matérielle plus en détails.
| sommaire pages techniques | sommaire port parallèle | page suivante |